
- Razlike i sorte koračnih motora
- Dizajn i princip rada
- Metode upravljanja fazama
- Načini upravljanja stupnjevima motora
- Način pogona mikrostepom
 Stepeni motor je elektromehanički uređaj koji pretvara električne signale u diskretne kutne pomake osovine. Upotreba koračnih motora omogućuje radnim tijelima strojeva da vrše strogo odmjerene pokrete, učvršćujući njihov položaj na kraju pokreta.
Stepeni motor je elektromehanički uređaj koji pretvara električne signale u diskretne kutne pomake osovine. Upotreba koračnih motora omogućuje radnim tijelima strojeva da vrše strogo odmjerene pokrete, učvršćujući njihov položaj na kraju pokreta.
Koriste se u CNC strojevima, robotizaciji, gdje su potrebni diskretni pokreti, fiksacija položaja i mala brzina.
Razlike i sorte koračnih motora
Po principu rada oni su bliži istosmjernim motorima. Dizajn elektromotora stalno se poboljšava kako bi se smanjili troškovi rada u proizvodnji, povećala učinkovitost i povećao broj okretaja. U usporedbi s istosmjernim motorom, nemaju četke, kolektor i namotaje s manje okreta.
Među prvim motorima stvoren je minijaturni motor za sat koji je dobio ime po francuskom inženjeru Mariusu Lovetu. Stator se odvaja od ruba ili u predjelu rotora ima mala stezanja. Rotor promjera 1, 5 mm, magnetski na bazi kobalta. Jedno navijanje u jednom redu snage 1, 5 volti. Kut rotacije je 90 stupnjeva.
Motor lavete koristi se i u medicini za crpljenje raznih tekućina, a često se koristi i u miješalicama i miješalicama.
Nedavno je u tijeku razvoj piezoelektričnih motora koji koriste piezomagnetski učinak i koji koriste feromagnetske materijale u konstrukciji. Poboljšani su linearni motori u kojima se osovina ne okreće, već vrši linearne pokrete. Za preciznu mehaničku opremu ruski proizvođači proizvode motore sa serijskom oznakom:
 LH.
LH.- DSHR.
- DSHG.
- DSHL.
- SM.
- DSHE
Takva poduzeća kao što su ATOM, ZETEK, Elektroprivod, Stepmotor, Vekson, NPO RIF, Saratov el. mehanički, VNIIEM Corporation, ZAO Uralelectromash, ARC Energoservice. Strane tvrtke: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron i drugi bave se proizvodnjom motornih pogona FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD. Raspon proizvedenih pogona motora je raznolik: po veličini, snazi, s ugrađenim mjenjačem i upravljačkom pločom.
Dizajn i princip rada
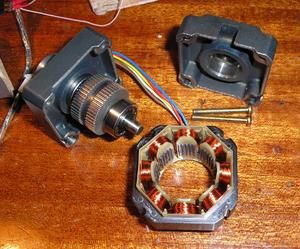
 Stepeni motor sastoji se od statora i rotirajućeg rotora. Jezgra statora izrađena je u obliku skupa listova električnog čelika (žigosani). To smanjuje vrtložne struje, a time i zagrijavanje. Stator je obodno podijeljen u 4.6, 8 uzdužnih žljebova. Primjenjuje se i više. Na izbočenjima između žljebova nalaze se namoti u obliku zavojnica. Broj utora odgovara broju motoričkih polova. Što je više polova manji je kut zakretanja rotora, to jest nagib.
Stepeni motor sastoji se od statora i rotirajućeg rotora. Jezgra statora izrađena je u obliku skupa listova električnog čelika (žigosani). To smanjuje vrtložne struje, a time i zagrijavanje. Stator je obodno podijeljen u 4.6, 8 uzdužnih žljebova. Primjenjuje se i više. Na izbočenjima između žljebova nalaze se namoti u obliku zavojnica. Broj utora odgovara broju motoričkih polova. Što je više polova manji je kut zakretanja rotora, to jest nagib.
Rotor se sastoji od jednog ili dva stalna magneta, s krajevima, čije su metalne ploče fiksirane zubima. U tom su slučaju plusevi S i N stalnog magneta podijeljeni na n pola, što odgovara broju zuba. Također utječe na veličinu koraka rotacije. Prema dizajnu ŠD proizvode se tri vrste ovisno o dizajnu rotora:
- reaktivna;
- rotor s trajnim magnetima;
- Hybrid.
 Reaktivno - rotor je izrađen od feromagnetskog materijala s uzdužnim utorima, polovima. Rijetko se koristi, samo za jednostavne zadatke. Uglavnom zbog činjenice da nema trenutak zaključavanja. Hibridni - rotor je izrađen od dvije polovice feromagnetskog materijala, s uzdužnim utorima i stalni magnet smješten je između njih. Žljebovi polovica jedan prema drugom pomiču se malim kutom kako bi se smanjila visina tona. Najčešće se koriste.
Reaktivno - rotor je izrađen od feromagnetskog materijala s uzdužnim utorima, polovima. Rijetko se koristi, samo za jednostavne zadatke. Uglavnom zbog činjenice da nema trenutak zaključavanja. Hibridni - rotor je izrađen od dvije polovice feromagnetskog materijala, s uzdužnim utorima i stalni magnet smješten je između njih. Žljebovi polovica jedan prema drugom pomiču se malim kutom kako bi se smanjila visina tona. Najčešće se koriste.
Kad se na namot statora primjenjuje impulsni napon, nastaje elektromagnetsko polje. Interakcija s najbližim polom stalnog magneta stvara zakretni moment. Osovina motora rotira određeni kut. Kut rotacije uglavnom ovisi o broju polova rotora.
Takav će se motor zvati stepper. Zbog svoje male veličine, WD serije Em 422 koristi se u matričnim pisačima.
Metode upravljanja fazama
Upravljanje uglavnom ovisi o broju polova i konfiguraciji namotaja statora. SD se proizvode uglavnom sa sljedećim namotima:
- Dva namota s 4 igle.
- Dva namota sa 6 žica sa prosječnim terminalom.
- Četiri namota - 8 zaključaka.
 Možete kontrolirati dvije metode, koristiti unipolarni napon - unipolarni ili bipolarni - bipolarni. Unipolarni stepper motor ima 4 pola i 2 namotaja. U četverofaznoj fazi svaki je namot podijeljen na pola i nalazi se na suprotnim polovima. Zakretanje se izvodi naizmjenično nanošenjem napona na namote. Sa 6 vodiča ili 5, također 2 namotaja, ali s slavinom iz sredine. Obično su srednji vodiči zavojnice povezani zajedno s negativnom žicom, a pozitivni se preko upravljanih tipki dovode do namotaja.
Možete kontrolirati dvije metode, koristiti unipolarni napon - unipolarni ili bipolarni - bipolarni. Unipolarni stepper motor ima 4 pola i 2 namotaja. U četverofaznoj fazi svaki je namot podijeljen na pola i nalazi se na suprotnim polovima. Zakretanje se izvodi naizmjenično nanošenjem napona na namote. Sa 6 vodiča ili 5, također 2 namotaja, ali s slavinom iz sredine. Obično su srednji vodiči zavojnice povezani zajedno s negativnom žicom, a pozitivni se preko upravljanih tipki dovode do namotaja.
Bipolarni motori imaju 4 namotaja, po 2 za svaku fazu. Upravljanje se događa kada se promijeni polaritet namotaja. S ovom kontrolom komplicirana je shema povezivanja koračnog motora, ali okretni moment se dobiva više. Glavne karakteristike su napon napajanja, potrošena fazna struja, korak, snaga i veličina prirubnice. Sjedala su standardizirana i označena kao npr. Nema 23. To odgovara razmaku između rupa za ugradnju 57 mm.
Načini upravljanja stupnjevima motora
 Upotreba motornih pogona u CNC strojevima konkurira samo servo pogonima, na primjer, u strojevima za eroziju ili pisačima, čak ih nadmašuju u svojim tehničkim mogućnostima, troškovima i jednostavnim upravljačkim shemama. Upravljanje se može provesti na digitalnim mikrovezama, specijaliziranim - A3977, na programiranom PIC16, putem tipki ili SMSD 1.5 pokretača.
Upotreba motornih pogona u CNC strojevima konkurira samo servo pogonima, na primjer, u strojevima za eroziju ili pisačima, čak ih nadmašuju u svojim tehničkim mogućnostima, troškovima i jednostavnim upravljačkim shemama. Upravljanje se može provesti na digitalnim mikrovezama, specijaliziranim - A3977, na programiranom PIC16, putem tipki ili SMSD 1.5 pokretača.
Većinu upravljačkih programa upravlja računalo putem RS-232, USB i LPT priključaka. Oni generiraju upravljačke signale: korak, smjer, razlučivost i pružaju ½ korak podjele do 1/32 i rade s programima: MACH3, KCam, DeskCNC, Turbocnc i drugi. Priključite motor na vozač kablom kako je opisano. Proučavajući rad programa, nije teško započeti s radom. Za uključivanje koristi se napon od 5 volti do 48 volti. Izuzetak su motori od 220/110 volti .
Način pogona mikrostepom
Glavno vrijeme koračnog motora je u načinu korak, korak ili pola koraka, a pri pokretanju i zaustavljanju preporučljivo je koristiti način mikrospora za precizno fiksiranje. Korak-korak korak se određuje dizajnom i kontrolom pulsa. Tijekom mikrostezanja na namote se primjenjuju sinusoidni naponi s željenim pomakom faze.
Rotor je fiksiran na određeni omjer faza struja u namotima. Izračunavanje točke ravnoteže formulom x = S * pi / 2 * arctan a / b gdje je:
- a je trenutak stvoren prvom fazom i b je druga faza;
- x je ravnotežna točka rotora ili mikrostepe u radijanima;
- S je kut koraka.
 Također je potrebno uzeti u obzir maksimalnu frekvenciju upravljačkog signala kod kojega nema gubitka ili dodatnog koraka tijekom rada. Glavni je pokazatelj prijelaznog načina rada koračnog motora, a u karakteristikama je naveden kao učestalost reakcije motora.
Također je potrebno uzeti u obzir maksimalnu frekvenciju upravljačkog signala kod kojega nema gubitka ili dodatnog koraka tijekom rada. Glavni je pokazatelj prijelaznog načina rada koračnog motora, a u karakteristikama je naveden kao učestalost reakcije motora.
Tijekom rada potrebno je nadzirati čistoću oko pogona i kako biste spriječili ulazak metalnih čipsa, moguće je otkazivanje pogona motora. Pronađite način zaštite pogona. Popravak je sličan popravku motora komutatora, zahtijeva točnost.
Nakon rastavljanja uzmite i puhajte stator komprimiranim zrakom i obrišite rotor krpom. Provjerite istjecanje ležaja.